Hybrid-Living: Roboter unterstützt in der Küche
Saugroboter und intelligente Lautsprecher sind bereits in vielen Haushalten etabliert. Doch wie kann ein Roboter noch in der Wohnung unterstützen? Navigationswege, Gerätebedienung ebenso wie der Zugang zu Regalen, Schränken oder Schubladen: Die Wohnung ist zurzeit ausschließlich auf die Nutzung durch den Menschen ausgelegt. Wie ein Roboter dennoch in der Küche unterstützen kann, damit beschäftigt sich das it’s OWL Projekt ‚Hybrid-Living‘ und entwickelt deshalb einen Service-Roboter, der den Geschirrspüler ein- und ausräumt. Ein Kick-off-Workshop zum Projektstart von ‚Hybrid-Living‘ hat Ende Juni alle Projektpartner:innen aus Forschung und Industrie am Forschungszentrum CITEC zusammengebracht, die sich in den nächsten drei Jahren diesem Thema widmen.
Hybrid-Living: Roboter unterstützt in der Küche
Die mögliche Unterstützung durch einen Service-Roboter führt dazu, Aufräum- und Umräumprozesse neu zu denken, Verstau-, Interaktions- und Bedienkonzepte an den Menschen und Roboter neu anzupassen, so dass Menschen in ihrer Wohnung durch einen Service-Roboter mehr Flexibilität, Unabhängigkeit, Autonomie und Komfort erreichen.
Sensorisch sowie mit einem Motor, einem Zugmagnet oder ähnlichem ausgestattete Inneneinrichtungsgegenstände unterstützen zusätzlich Mensch und Roboter bei diesen Prozessen, so dass ein ganzheitliches Synergiefeld zwischen Mensch, Roboter und Umgebung entsteht.
Forschung und Industrie arbeiten Hand in Hand
„Bis zum Einsatz eines universellen Haushaltsroboters bei uns zu Hause sind noch sehr viele grundlegende Fragen und Detailprobleme zu lösen. Ich freue mich, dass wir in dem Projekt mit Miele, Hettich, Neura-Robotics und der Uni Bielefeld exzellente Partner zusammengebracht haben, um hier substantielle Fortschritte zu erzielen“, sagt der Projektkoordinator und Leiter des CITEC-Zentrallabors Dr. Sven Wachsmuth.
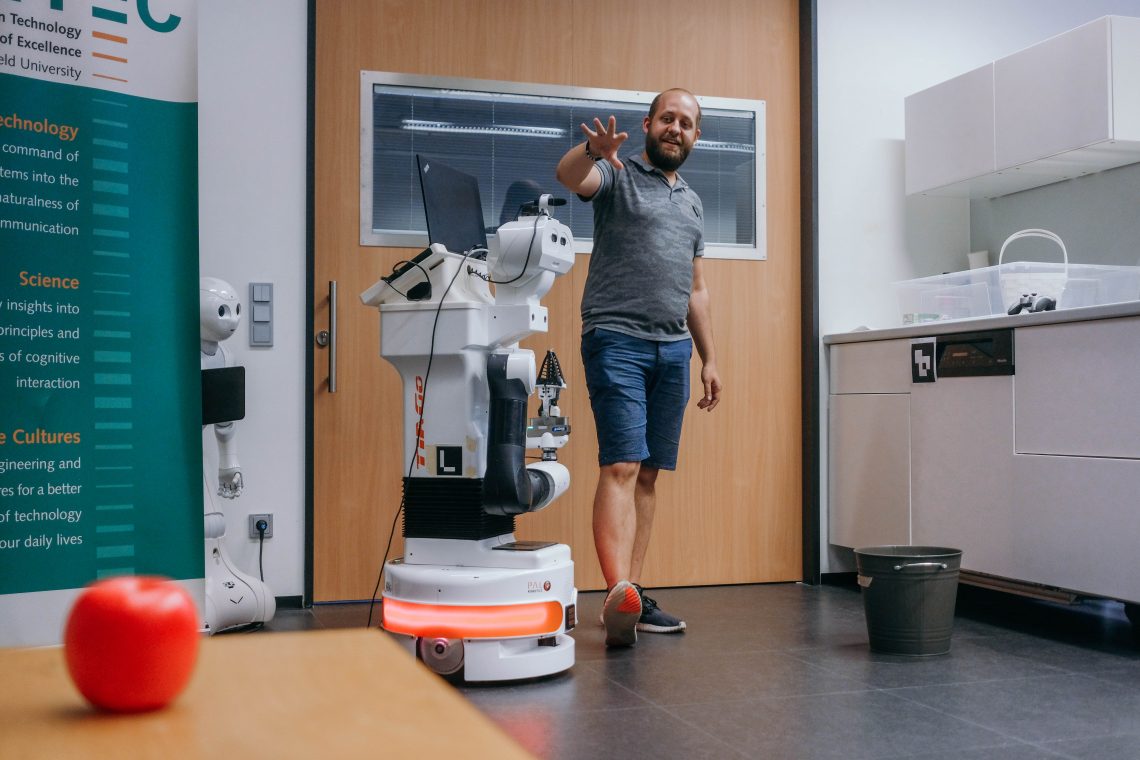
Konkret werden in dem Projekt zwei mobile, einarmige Roboter verglichen. Es wird „erlebbar“ gemacht, wie sich Aufräum- und Umräum-Prozesse in der Präsenz eines mobilen Service-Roboters verändern, so dass die Küche zur „hybriden“ Arbeitsumgebung wird.
Auf die Forscher*innen warten viele Herausforderungen
Damit sich der Roboter wirklich nützlich machen kann, muss er typische Küchengegenstände erkennen und zwischen Schränken, Arbeitsflächen und Geräten umräumen können. „Wir sind uns kaum bewusst, wie viele Fähigkeiten wir bei solchen alltäglich anmutenden Tätigkeiten äußerst routiniert verknüpfen: So müssen wir kaum nachdenken, wie wir einen Teller greifen und bewegen müssen, etwa um darauf befindliche Reste vor dem Einräumen in den Geschirrspüler noch in den Mülleimer zu bugsieren und dann den Teller im schon beinahe gefüllten Geschirrspüler gut unterzubringen“, macht Professor Dr. Helge Ritter (Neuroinformatik) auf einige der Herausforderungen des Projekts aufmerksam.

Für Roboter sind derartige Koordinationsleistungen in so komplexen Umgebungen wie einer Küche noch weitgehend ein Forschungsgegenstand; erst recht, wenn sie in variablen Situationen adaptiv und Hand in Hand mit dem Menschen ausgeführt werden sollen. „Hier wollen wir Roboter mit allgemeinen Anfangsfähigkeiten ausstatten, die dann vom Menschen möglichst einfach beeinflusst werden können: Der Roboter soll dadurch zu einem Helfer werden, dessen Fähigkeiten durch intuitives Anlernen schrittweise an individuelle Bedürfnisse angepasst werden kann“, erläutert Helge Ritter eines der zentralen Ziele des Projekts.
Interaktion Mensch – Roboter
Aber woher soll der Roboter wissen, wohin das Geschirr geräumt werden soll, wann der Tisch abgeräumt werden kann oder dass die blaue Kaffeetasse heute erst einmal stehen bleiben soll? Wir Menschen handeln solche Dinge über sprachliche Interaktion aus (,Lass die Tasse bitte erst einmal noch stehen‘), und auch der Roboter soll sprachlich konfiguriert und in der Situation spontan instruiert werden können.
„Dabei ist es wichtig, dass die Nutzer:innen die natürlichen Interaktionsmittel verwenden können, die sie auch im Gespräch mit Menschen nutzen: Die sprachlich vielleicht mehrdeutige Referenz ,die Tasse‘ wird für den Roboter eindeutig auflösbar, weil die Nutzer:in gleichzeitig in eine bestimmte Richtung zeigt, und bei Missverständnissen kann auf alltägliche Reparaturstrategien zurückgegriffen werden (,die blaue?‘ – ,genau‘)“ erklärt Professor Dr. Hendrik Buschmeier (Digitale Linguistik), der im Projekt für die Modellierung der multimodalen Mensch-Roboter-Kommunikation zuständig ist.
Wichtig für die Akzeptanz der Interaktionsmöglichkeiten, und somit auch des Roboters in der eigenen Wohnumgebung, sind dabei die Erwartungen und Vorstellungen der Nutzer:innen, die in den nutzerzentrierten Entwicklungsprozess mit einfließen werden. Die Ergebnisse werden von den Industriepartner*innen in zukünftigen Produktentwicklungen genutzt. Dabei werden auch parallele Szenarien im Produktionsumfeld berücksichtigt.